
激光变形量测系统
激光变形量测系统基本原理
激光变形量测系统是将激光准直技术、光电成像技术、图像处理技术、互联网数据通信继续融合在一起的变形光纤光栅量测技术,是珏光科技针对高铁、地铁、桥梁等土木工程自主研发的激光变形量测系统,相关技术已经申请国家专利,拥有完整的知识产权。 由主要三部分组成:
• 激光发射器
• 二维图像传感器
• 激光变形量测一体机

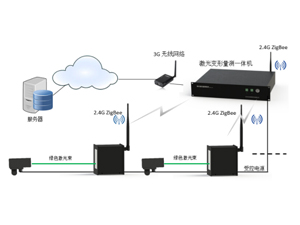
图1 激光变形量测系统架构图
激光变形量测一体机为系统的核心,它可以设定测量时间间隔、激光发射器的工作时间、二维图像传感器的通讯和采集, 控制二维图像传感器和激光发射器的电源。 然后激光变形量测一体机将数据转发给云端服务器,从而完成整个系统的数据采集。 从云端的服务器也可以发指令给激光形变量测一体机, 使其按照云端服务的设定而进行数据采集。
本系统利用激光的单向性,从一个测点将激光对准另外一个测点的成像靶面,在固定成像光电器件、激光器和成像靶面的情况下,在成像靶面上显示激光光斑,将初始的光斑位置拍照后,经过图像处理的方法找出激光光斑的中心位置,信号处理系统可以通过无线网络将数据发送到服务器,以记录其初始的光斑位置。当测点2相对于测点1发生位移,那么在成像靶面上的激光光斑发生位移,系统再次拍照,经过同样的处理,将数据记录,根据两次的测量数据,从而可以得到两测点的相对位移∆X、∆Y。

1) 理论分辨率 由于系统采用CMOS成像法,我们采用合适的镜头(6mm焦距)将靶面的面积为DxL的面积成像于dxl的CMOS上,CMOS的像素有2592 ×1944,由于我们采用的成像靶面尺寸为80mmx60,这样,每像素的分辨率为80/2592mm/pixel=0.0309mm, 这就是我们的理论分辨率。2) 空气流动对仪器精度的影响及实际精度 对于30米距离的空气扰动而言,在地铁隧道中,我们测试的结果单次测量的精度小于为1mm,即±0.5mm。 空气流动对系统误差的贡献是一个随机误差,因此可以采用多次测量求平均的方法来实现更高的精度,多次测量队精度提高,可以用下列公式来表达: 式中:σ—随机误差; n—测量次数; T—测量值; S—信号的真实值。 由于我们测量一个通道(假设8对激光沉降仪为一个通道,考虑到静力水准仪是8个仪器一个通道),测量时间为8×0.3s=2.4s, 测量100次可以提高随机误差的10倍的精度,采用240秒测量一次,应该是可以接受的,从上述分析,可知单台激光沉降仪的随机误差为:0.5-0.1=0.4mm 如果采用100次累加,那么精度应该是 0.1+0.4/10=0.14mm. 因此采用100次平均累加后,单台激光沉降仪的精度为±0.14mm。
图2 






